III. COGNITIVE STRUCTURES OF KINESTHETIC SPACE
The concept of kinesthetic spatial cognition defines an overall realm within which the choreutic conception can be reevaluated. Four principal components of choreutics are identified here as also having been well developed in in psychological and motor control research, briefly; A) Systems of reference; B) Location code; C) Map–like spatial images, and; D) Symmetrical transformations. This provides psychological validity for their use in the choreutic system.
Section IIIA considers how spatial information must be defined relative to a system of reference. Types of egocentric (body-relative) and exocentric (environment-relative) reference systems have been identified in cognitive studies. Further differentiated reference systems have been distinguished in choreutics and Labanotation which could provide tools for cognitive studies.
In Section IIIB a variety of research is considered which indicates that the mental representation of kinesthetic spatial information is based on individual locations. These positions of agonist/antagonist equilibrium are evident as curvature peaks between individual strokes in the trajectory formation model. Curved versus angular paths are created by the amount of overlap between successive strokes. A virtually identical structure is used in choreutics where paths are identified according to observable locations of “peaks”. Coordinative structures are identified as the body-level counterpart to the spatial-level of the location code. A library of reflexive movements or “coordinative structures” allow the body to automatically accommodate to the planned trajectory of a body-part.
Section IIIC considers how individual locations are conceptually joined together into map-like images (cognitive maps) which simultaneously represent the entire spatial environment. Choreutics uses polyhedral-shaped cognitive maps of the kinesphere (variously termed, grids, nets, scaffolding, etc.).
Varieties of kinesthetic-motor symmetrical transformations are identified in Section IIID, these include body-transfer, translation, sizing, reflection, rotation, and retrogradation. The ability to perform symmetrical transformations is essential to spatial cognitive ability. Choreutic “scales” are identified as being bodily and cognitive practice in executing and conceptualising symmetrical transformations and bodily adjustments in maintenance of dynamic equilibrium.
IIIA. Systems of Reference
Spatial information (eg. directions) must be known relative to some system of reference, otherwise its meaning will not be clear. For example, the direction “forward” might be considered relative to the anterior surface of the body, or it might be considered relative to the front of a room (eg. “come forward”, that is, come to the front of the room). The use of systems of reference in spatial cognition research has been generally distinguished into egocentric (relative to the subject’s body) or exocentric (relative to the exterior environment) systems of reference. Several other more detailed systems of reference have been distinguished within choreutics and Labanotation.
IIIA.10 Egocentric versus Exocentric Reference Systems in Psychology
Spatial cognition research has generally distinguished between the egocentric reference system in which directions are conceived as relative to the body, versus the exocentric reference system in which directions are conceived as relative to the surrounding environment.
IIIA.11 General Distinctions.
The egocentric and exocentric reference systems are referred to in many ways. These include the “personal and extrapersonal frames of reference” (Ruff, 1985; Ruff et al., 1981), as “viewer centred” versus “object centred” (Frisby, 1986, p. 171), as “body-related reference” verses “allocentric”, as the “spatial reference system” or “environment-related reference” (Larish and Stelmach, 1982), as “viewer-centred frame of reference” versus “frames of reference that are embedded in external objects” (Hinton and Parsons, 1981), as a “body-based reference system” versus an “objective gravity-based reference system” or an “environmental frame of reference” (Riesser and Pick, 1976), or as the “coordinates of body space” versus the “coordinates of external space” (Souder, 1972, p. 14).
The egocentric reference can be described as a “direct dialogue” with the perception of the world, producing a “body-centered mapping” of the space, while the exocentric reference consists of “mental representations” which can “step back from the immediate sensory input” about the world and to compute a more abstract “allocentric space-coordinate system” (Paillard, 1987, p. 43). In an egocentric, “subject-relative” bodily coordinate system the retina, head, torso, or pelvis etc. serve as the frame of reference, while in an exocentric, “object-relative” external coordinate system objects in the visual field serve as the frame of reference (Mack, 1986). Roland (1979) asserts that the egocentric “intrapersonal space” and the exocentric “extrapersonal space” present different types of cognitive tasks, producing different cortical activation patterns.
For visually perceived figures, pictures, etc., the egocentric orientation can be referred to as the “retinal orientation” (ie. in the same orientation relative the the subject’s eye regardless of the orientation relative to gravity). The exocentric orientation might consist of a gravitational orientation (ie. the orientation relative to gravity regardless of the retinal orientation) or as a particular orientation relative to a visual reference “frame”, or other visual features which surround the object (Rock, 1973, p. 11).
The distinction between egocentric and exocentric reference systems is important in the theory for the visual recognition of objects which has been developed for computer programs. Egocentric representations are conceived as consisting of a single viewpoint of a visual object while exocentric representations consist of “viewpoint-independent representations” of an object so that it can be recognised from any angle. Exocentric representations are centred in the object rather than being centred in the retinal image of the observer. The directions (eg. vertical, lateral, sagittal) of an exocentric representation can be based on the dominate axes which are inherent in the physical structure of the object. These salient axes then become the basis for describing the length, width, etc. of the object in an exocentric fashion. When there are no obvious axes within the shape then the gravitational vertical is used as the basis of the exocentric reference system. Successive viewer-centred images are used to derive an updated object-centred (viewpoint independent) representation of an object (Frisby, 1986; Humphreys, 1983; Hinton and Parsons, 1981; Marr, 1980; Marr and Nishihara, 1978).
In the memory and recall of spatially directed body movements an egocentric reference system can be conceived as recalling a particular bodily “response” while an exocentric reference system can be conceived as recalling an exterior spatial “place” (regardless of the bodily movement involved) (Bremner and Bryant, 1977). That is, the egocentric representation relies on a kinesthetic sensory code, while the exocentric representation relies on an abstract spatial code.
However, Millar (1981) distinguishes between two types of “egocentric” spatial code. Egocentric “movement coding” consists of knowing a spatial location according to a particular body movements required to get there, whereas egocentric “self-referent coding” consists of knowing a spatial location according to its relationship to one’s own body (eg. that the location lies on the body’s median plane, or is directly in front of the right shoulder, etc.). For example, an egocentric self-referent code can be recalled with different body movements such as reaching to a body-relative location with either arm.
IIIA.12 Developmental Progression.
A developmental progression is identified in which infants tend to base their knowledge of spatial locations on an egocentric representation in which locations of objects are recalled by reproducing the same movements which were used to experience the locations originally. However, older children and adults have learned to use an exocentric representation in which locations of objects can be recalled independent of the particular movements or the body’s orientation relative to the space (Acredolo, 1977; Bremner and Bryant, 1977; Hardwick et al., 1976; Piaget and Inhelder, 1967).
IIIA.13 Egocentric and Exocentric Representations in Spatial Cognition.
Depending on task requirements and the intention of the Subject, spatial information is sometimes egocentrically represented and sometimes exocentrically represented.
In the typical “oblique effect” (see IVA.52) adult humans can identify lines or rectangles faster if they are oriented vertically or horizontally than if they are oriented diagonally (45°). The system of reference operating in this oblique effect can be isolated by tilting Subjects (45°) so that gravitational vertical and horizontal lines (exocentric) are oriented diagonally relative to the retina (egocentric) (and vice versa, gravitational diagonal orientation is equivalent with retinal vertical and horizontal orientation). In this condition Attneave and Olson (1967) found that the oblique effect corresponds to the (exocentric) gravitational orientation rather than the (egocentric) retinal orientation.
Likewise, Rock (1973) experimented with a variety of visual stimuli and found that the time to recognise a visual figure is typically based on its (exocentric) gravitational orientation rather than its (egocentric) retinal orientation. For example, if a visual figure is tilted away from its usual gravitational orientation it will take longer to recognise, but tilting a Subject so that an object is not in its usual retinal orientation (but retaining its usual gravitational orientation) has no effect on recognition time.
Similarly, Rieser and Pick (1976) probed the reference system used in kinesthetic perception. In “haptic” perception Subjects grasped a bar (oriented vertically, horizontally, or diagonally) with their hand, and in “tactual” perception the bar (in a particular orientation) was pressed against Subjects’ forehead or abdomen. Subjects’ bodies were then tilted and they attempted to recognise the particular bar orientations from this new bodily orientation. The “tactual” learners tended to recognise the stimuli according to the egocentric body reference system and the “haptic” learners tended to recognise the stimuli according to the exocentric gravitational reference system. It was concluded that haptic sensations (grasping the bar) are learned according to a gravitational reference system since joint and muscle movements are closely integrated with vestibular information within the kinesthetic perceptual motor system (eg. reflexive motor actions can be induced by changes in body orientation). However, purely tactual sensations (the bar pressed against the skin) are not tied to vestibular information about gravity but are typically used to identify the egocentric location of a skin irritation (eg. an itch).
However, Rieser and Pick (1976, p. 118) noted that Subjects asked questions (which were not answered by the experimenters) about whether they should interpret the stimuli according to gravitational or bodily orientation. Thus it appears that Subjects were aware of the possibilities of perceiving stimuli according to either reference system. Also, Olson and Attneave (1970) found that both retinal and gravitational orientation played a part in how the orientation of simple figures were perceived within a group of similar items. This corresponds to Attneave and Reid’s (1968) finding that by specifically instructing Subjects to learn visual stimuli according to their egocentric retinal orientation that the oblique effect can also occur relative to the egocentric reference system. They conclude that the orientations which are perceived as vertical or horizontal are recognised faster than those perceived as diagonal, and that this perception may be either egocentric (retinal) or exocentric (gravitational) depending on the intention of the subject.
Attneave and Benson (1969) also found that Subjects could use either an egocentric or an exocentric reference system. They taught Subjects to respond to vibrations at several locations on each hand, then the hands were switched so that the vibrations were in the same (exocentric) environmental locations, but were in contact with different (egocentric) bodily locations. Subjects could voluntarily respond equally well to vibrations at the same environmental location or to vibrations at the same bodily location. However, Subjects who were not blindfolded exhibited a greater tendency to respond to exocentric environmental locations, suggesting that vision tends to create a reliance on an exocentric reference system.
In some experiments the locations and orientations of visual objects appear to be represented in an egocentric body-relative code. Attneave and Farrar (1977) showed Subjects seven objects on a shelf and later asked questions (with the objects out of view) about whether an object (or a part of an object), was to the right or left of another object (or part of an object). The questions were answered fastest by “control” Subjects who remained facing the objects so that their egocentric and exocentric locations were unchanged. The questions were answered just as accurately (though with a slower response time) by other Subjects who were turned around (180°) and visualised the objects in front of themselves just as they had looked before (egocentric locations in the visual image were identical but exocentric room-relative locations were reversed). The questions were answered least accurately (and slower than the control Subjects) by Subjects who were turned around (180°) and visualised the objects behind themselves just as they actually are in the real world (egocentric locations in the visual image were reversed but exocentric room-relative locations were identical). These results indicate that remembering the egocentric body-relative locations of the objects was easier than remembering the exocentric room-relative locations of the objects.
The typical exocentric spatial representation is also identified in the mental representation of body movements in terms of a spatial location code. This has been demonstrated in spatial positioning tasks in which either limb can often recall a final location just as well regardless of which limb learned the location. That is, the same limb can learn and recall the location (intra-limb), or one limb can learn the location and the other limb can recall the location (inter-limb) (Larish and Stelmach, 1982; Stelmach and Larish, 1980). This exocentric spatial location code for the representation of body movements is more fully considered in section IIIB.
IIIA.14 Egocentric / Exocentric Translation.
An exocentric environment-relative location must be translated into an egocentric body-relative code in order to direct a bodily movement toward that location (Jeannerod, 1983; Saltzman, 1979, p. 104). If the location of an object is known relative to the environment, then the orientation of the body and its parts need to be known relative to that environment, and thus a body part can be moved in the correct direction toward the location of the object. An exocentric spatial code is valuable since it provides a knowledge of the structure of the environment or of an object, independent of the orientation or movements of the body. However, for the body to reach toward a particular exocentric location, the current orientation of the body in the environment must be used to translate the exocentric code into an egocentric code utilised by body movements.
IIIA.15 Misperceptions of Egocentric and Exocentric Directions.
The ability to determine the exocentric gravitational vertical is biased by other exocentric and egocentric influences. Many of these effects are related to “visual kinesthesia” in which visual exocentric information influences the perception of egocentric kinesthetic information (see IIA.12).
The visual environment can be experimentally tilted by having Subjects look through a tilted mirror (Asch and Witkin, 1948a) or by looking into a specially constructed tilted room (Asch and Witkin, 1948b). Under these conditions Subjects’ perception of the true gravitational vertical or horizontal (by verbally indicating the orientation of a visual rod) is biased to correspond with the tilt of the environment. Thus, the (exocentric) “axes of the visual field” exert powerful influence on the perception of the (exocentric) gravitational vertical, regardless of the (egocentric) “position of the body” (Asch and Witkin, 1948a, p. 337). The effect is so robust that even with full knowledge about the experimental set-up Subjects and Experimenters both perceive a plumb-line within a tilted environment to be hanging at an angle to the vertical, and when standing in the environment they (incorrectly) perceive themselves to be standing off–vertical while the tilted room is perceived to be oriented upright (Asch and Witkin, 1948b). Similarly, in a “body adjustment test” Subjects are asked to adjust a chair so that they are sitting upright inside a tilted room, in which case many Subjects will adjust the chair so that their body posture is aligned with the tilted room rather than the gravitational vertical (Witkin et al., 1962, pp. 4–5).
Subjects can accurately adjust a luminous rod to the gravitational vertical in a dark room, but when a Subject’s head or body is tilted then this (egocentric) information will cause perception of the (exocentric) gravitational vertical to be less accurate (Witkin and Asch, 1948a). This effect is greater when the Subject actively produces the body tilt than when the subject is passively supported during the tilt (Werner et al., 1951). Similarly, when electrical stimulation is applied to one of the sterno-cleidomastiod neck muscles, or audio stimulation is given to one ear (these conditions likely producing a subtle change in the perception of egocentric orientation) (Wapner et al., 1951a), or when the Subject undergoes a rotary acceleration or deceleration (creating vestibular stimulation) (Wapner et al., 1951b), then the rod will not be accurately adjusted to the (exocentric) gravitational vertical.
These same effects occurred when the rod was kinesthetically adjusted to the vertical (eg. blindfolded Subjects manipulated the rod with both hands, rather than giving verbal instructions for the experimenter to move the rod). Head tilt, body tilt, and rotary acceleration / deceleration all created kinesthetic misperceptions of the gravitational vertical (Wapner and Werner, 1952).
Misperceptions of the gravitational vertical when the head or body is tilted may be encouraged by the activation of reflexive righting reactions. For example, Hellebrandt and Colleagues (1962b) give several examples of the “Ikai stick” which is held by Subjects in a gravitational vertical alignment but which spontaneously deviates off of this alignment (because of asymmetric changes in the body’s muscular tone) when the tonic neck reflex is induced by turning or tilting the head.
When a luminous frame is placed around the luminous rod (the “rod–and-frame task”) then an (exocentric) tilt of the frame will create a misperception of the (exocentric) gravitational vertical of the rod (Witkin and Asch, 1948b). It appears that the tilted rod-and-frame visual display induces an illusion of egocentric self-tilt. Thus, attempting to align the rod to one’s own bodily superior / inferior axis is more accurate than attempting to align the rod to the gravitational vertical (Sigman, et al., 1979).
In a similar way, the perception of the rod’s (exocentric) orientation to the gravitational vertical is also biased by the initial (exocentric) orientation of the rod (Werner and Wapner, 1952). Apparently the initial position is perceived as closer to vertical than it actually is (analogous to the frame being perceived as vertical in the rod-and-frame task), and so this misperception continues to influence the adjustment of the rod to the gravitational vertical.
In all these conditions discussed above the (exocentric) tilt of the visual environment (eg. a tilted room, a tilted frame) exerts an influence of the perception of the (exocentric) gravitational vertical. Typically, all of these effects are even greater when the (egocentric) orientation of the body is also tilted off vertical (Asch and Witkin, 1948b; Witkin and Asch, 1948b).
In analogous experiments, Subjects indicated the location of their body’s median plane, rather than the gravitational vertical. Subjects marked a point on a piece of paper (with an unseen outstretched arm) which indicated the location of their body’s (egocentric) median plane. When the eyes were fixated right or left of centre (head facing forward), or the head was turned right or left of centre (with the eyes fixated forward) then the perception of the median plane was also shifted (Werner et al., 1953). Similarly, when the head is turned right or left, pointing at a target is less accurate than if the head is facing forward (Wyke, 1965). In these cases the egocentric direction forward for the eyes and the egocentric direction forward for the head were both influencing the perception of the egocentric direction forward for the shoulders. These three different egocentric “forward” directions are identical to the notion of “divided fronts” as developed in Labanotation (see below). Other Subjects kinesthetically manipulated a rod into alignment with the perceived median plane of their body. A tilt of the head or body in the frontal plane also caused the perception of the median plane to deviate (McFarland et al., 1962).
IIIA.16 Field-dependence, Field-independence.
In the research just considered (IIIA.15) it was often noted that, while the exocentric visual environment (eg. the tilted frame or room) exerted an influence of the perception of the gravitational vertical, there were considerable and consistent differences between individual Subjects. Some Subjects were consistently influenced by the tilt of the visual environment while other Subjects consistently adjusted the rod close to the true gravitational vertical regardless of the tilt of the visual environment (Asch and Witkin, 1948a; 1948b; Witkin and Asch, 1948b).
Research into these individual differences gradually developed into a theory of “field-dependent” and “field-independent” perceptual styles. Witkin and Colleagues (1962) describe how this was originally based on individual differences in Subjects’ spatial perception but the course of research revealed how this was indicative of psychological aspects of personality, or of individuals’ “‘style of life’” (p. 4):
. . . the way in which each person orients himself in space is an expression of a more general preferred mode of perceiving which, in turn, is linked to a broad and varied array of personal characteristics involving a great many areas of psychological functioning. (Ibid, p. 1)
. . . These [field-dependent / independent characteristics] reflect the quality of the person’s experience of his surroundings, his way of perceiving and using his body, the nature of his relation to other people, and aspects of his controls and defenses. (Ibid, p. 3)
The rod-and-frame test (see IIIA.15) is only one illustration of Subjects’ field-dependence/independence. Some Subjects perceive that the rod is vertical when actually it is aligned with the (tilted) frame. Their perception can be described as being “dependent” on the surrounding visual field. Other Subjects adjust the rod close to the true vertical regardless of the tilt of the frame. Their perception can be described as being “independent” of the surrounding visual field. This effect in the rod-and-frame task has been reliably correlated with many other spatial tasks (eg. finding a hidden figure in a complex design, inkblot interpretation, picture completion, object assembly, picture drawing; for details see Witkin et al., 1962).
Witkin and Colleagues (1962) conceive of field-dependence and field-independence as being two poles along a continuum rather than distinct types. Generally speaking, field-dependent people are described as “guided by the axes of the surrounding visual field rather than by the sensations from within the body” (p. 2). This greater bodily awareness of field-independent Subjects was confirmed in later research. Field-independent Subjects (as assessed by the rod-and-frame task) were found to be more skilled than field-dependent Subjects in “postural pursuit tracking” which requires a high degree of kinesthetic awareness (Souder, 1972).
Witkin and Colleagues (1962) describe how this conception of being influenced by the surrounding visual field was expanded to include Subjects’ tendency to be influenced by any type of exterior stimulation. For example, field-dependent people are “likely to change their stated views on a particular social issue in the direction of the attitudes of an authority” (p. 3). The field-dependent perceptual style (relying on exterior stimuli rather than interior sensations) is thought to indicate a poorly developed “sense of body” which is linked to the “sense of self”, and so these Subjects may tend to “have a less developed sense of their identity” (p. 5).
IIIA.20 Labanotation and Choreutic Reference Systems
At least five different systems of reference can be distinguished within choreutics and Labanotation according to their egocentric/exocentric components. These are identical to reference systems identified in cognitive studies but provide more systematic detail about variations in kinesthetic spatial referencing.
Five reference systems identified here are; 1) the constant cross of axes; 2) fixed points; 3) line-of-travel; 4) standard cross of axes, and; 5) body cross of axes. In addition, “divided fronts” can be identified when more than one “forward” is evident within the standard or body reference systems. Choreutic and Labanotation reference systems are used to specify the “kinds of orientation” (Preston-Dunlop, 1984, pp. 9-12) of the dimensional (Cartesian) cross of axes (Hutchinson, 1970, pp. 414-432) like a type of “key signature” (Preston-Dunlop, 1969, p. 136).
IIIA.21 Constant Cross of Axes Reference System.
The “constant cross of axes” (Hutchinson, 1970, pp. 105-106, 421–424; Knust, 1979a,b, examples 258d, 854b), or the “space dominant” reference system (Preston-Dunlop, 1984, p. 11) refers to an exocentric reference system in which Subjects “relate all directions to the dimensions of the room” (Preston-Dunlop, 1969, p. 136). The vertical dimension is aligned with gravity. The sagittal dimension is aligned parallel to the front/back axis of the room. The lateral dimension is aligned parallel to the right/left axis of the room. This could be called a room-relative reference system since it is based on the principal axes through the room (or any other spatial environment).
IIIA.22 Fixed Points Reference System.
Another exocentric system of reference can be defined according to “fixed points” in the room (or any other environment) (Hutchinson, 1970, p. 430; Preston-Dunlop, 1984, p. 11). The spatial directions (forward, back, up, down, etc.) are conceived as always being toward a specific location (eg. toward the window) regardless of the location in the room where a person is located, or which way the person is facing.
IIIA.23 Line of Travel Reference System.
A system of reference can be defined according to the line along which a person is locomoting through space. This is variously referred to as the “direction of progression”, the “line of dance” (Knust, 1979a,b, examples 308e, 859a), the “line of direction” (Hutchinson, 1970, p. 431) or the “line of travel” (the term suggested by this author). In this exocentric reference system “forward” is conceived as being the direction in which the locomotion is traveling towards while “backward” is conceived as being the direction which the locomotion is traveling away from (regardless which way the person is facing). Likewise, “right” and “left” are conceived as being towards the right and left of the line of travel. The line of travel reference system is useful when directions for steps are related to the direction of travel (eg. ballroom dance).
IIIA.24 Standard Cross of Axes Reference System.
A typical effect in psychology experiments is that when people are not oriented vertically (eg. lying on the floor) they tend to conceive of “up” and “down” to be relative to gravity rather than relative to the body (see IIIA.13). Laban (1966, p. 18) described this same phenomena as “the beginning of an intellectual complication” in which we “transpose” the body vertical to the gravitational vertical. In choreutics and Labanotation this reference system is referred to as the “standard cross of axes”, the “line of gravity cross of axes” (Hutchinson, 1970, pp. 414-433; Knust, 1979a,b, example 258b) or as the “standard orientation” (Preston-Dunlop, 1984, pp. 9-11) which is the “normal method of judging direction” (Preston-Dunlop, 1969, p. 136). The notion of “standard” refers to how this is the most typically used cognitive reference system and is the reference system assumed to be used in Labanotation or choreutics unless specified otherwise.

|
Constant cross of axes; Exocentric.
|
|
Fixed points; Exocentric.
|
|
(eg.) Line of travel; Exocentric.
|
|
Body cross of axes; Egocentric.
|
|
Standard cross of axes; Combined ego-exo-centric.
|
|
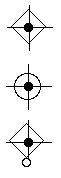
Figure IIIA-1. Labanotation symbols for reference systems (Hutchinson, 1970, pp. 416, 430-432; Knust, 1979a,b, examples; 258b,d,f, 308e, 854b, 859a; Preston-Dunlop, 1969, p. 137).
|
The standard cross of axes consists of a combination of egocentric and exocentric reference systems. The vertical dimension is oriented relative to the (exocentric) line of gravity. The sagittal and lateral dimensions remain always perpendicular to the line of gravity (ie. horizontal) and are oriented relative to the (egocentric) anterior/posterior body axis and the right/left lateral body axis.
IIIA. 25 Body Cross of Axes Reference System.
In a purely egocentric reference system the vertical dimension is aligned with the superior/inferior bodily axis, the sagittal dimension is aligned with the anterior/posterior bodily axis, and the lateral dimension is aligned with the right/left lateral bodily axis. This is referred to in Labanotation and choreutics as the “body–cross of axes” (Hutchinson, 1970, p. 417; Knust, 1979a,b, example 258f) or as a “body dominant” reference system (Preston-Dunlop, 1984, p. 11) in which Subjects “relate all directions to the dimensions of the body” (Preston-Dunlop, 1969, p. 136).
IIIA.26 Location of “Centre”.
The notions of egocentric and exocentric refer to the conceived location of the centre of a system of reference. Further specifications of the location of centre can also be made.
In Laban’s (1963, p. 93) egocentric conception “the direction c [centre] is always in the body centre” (italics his). Preston-Dunlop (1978, p. 70) confirms that “Laban placed ‘centre’ at the body’s centre, which is approximately at the navel. Medium level directions were thence, on level with the navel or waist and this applied to all limbs”. Placing the centre at the body's centre is also advocated in other choreutic writings (Bartenieff and Lewis, 1980, pp. 25-28; Dell, 1977, p. 5; Laban, 1966, pp. 11–17).
An egocentric reference system can also be centred at any place within the body. For example, the hands are often described as creating a small kinesphere with the centre in the middle of the palm (Bodmer, 1974, p. 28; 1979, p. 7; Laban, 1926, pp. 72–73). It is also common to consider the space available to limb movement according to reference systems which are centred at the most proximal joint which is articulating (Bartenieff and Lewis, 1980, p. 26; Lamb, 1965, p. 52) and this is the conception of limb movement typically used in Labanotation (Hutchinson, 1970, pp. 32, 229). Different centres can also be distinguished within the torso; at the sternum, near the belly-button, and in the pelvis. Different dance styles can be observed to relate their movements to one of these three ego-centres in the torso (Bodmer, 1979, pp. 3-4; Preston-Dunlop, 1978, pp. 70-71).
These joint-centred systems of reference are used in this same way within motor control studies, for example as a “shoulder girdle-centred spatial coordinate system” (Saltzman, 1979, p. 104) or “retinocentric space” (Paillard, 1987). Likewise, in kinesiology when the reference planes are centred at the body’s centre of gravity they are referred to as “cardinal planes” whereas if they are conceived as passing through a joint then they can be termed (eg.) shoulder joint planes (Rasch and Burke, 1978, pp. 97-98).
IIIA.27 Divided Fronts.
Further subdivisions can be identified within the standard or body reference systems. If the body is twisted (for example) it may be that the head is facing one direction, the chest is facing a different direction, and the pelvis is facing yet another direction. The question arises, which direction is “forward”? In Labanotation this situation is referred to as a “divided front” and three possible sub-reference systems are be used; 1) stance, 2) free-end of twisted-part, and 3) base of twisted-part (Hutchinson, 1970, pp. 307-310).
|
Standard “stance” reference key.
|
Standard twisted-part reference key.
|
Standard base-of-twisted-part reference key.
|
|
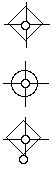
Figure IIIA-2. Labanotation symbols for standard cross of axes with a divided front (Hutchinson, 1970, pp. 309-310, 425-426).
|
The term “stance” is used to refer to a particular facing (towards front) which has been previously established by the facing of the entire body. This facing is then retained regardless of twistings of various body-parts. In Labanotation the forward direction determined by “stance” is usually used to determine the direction of steps (locomotion) regardless of the body twistings which occur during locomotor patterns (Hutchinson, 1970, p. 308).
The designation of the direction towards front can also be taken from the free–end or from the base of a twisted body-part. The “free-end” refers roughly to the distal extremity of the twisting body-part(s) while the “base” refers to the proximal point-of-attachment or to the body-part which is connected to the ground; for example (Hutchinson, 1970, p. 308):
|
Twisted body-part(s)
|
Base
|
Free-end
|
|
arm
|
shoulder
|
hand
|
|
whole-torso
|
feet
|
shoulders
|
|
head-neck
|
shoulders
|
head
|
|
chest
|
pelvis
|
shoulders
|
|
pelvis
|
feet
|
pelvis
|
The general rule used in Labanotation is that the forwards direction (ie. “front”) is determined by the free-end when the pelvis, chest, shoulders, head, and neck are twisting, and is determined by the base of the body part when the arms or legs are twisting (Hutchinson, 1970, p. 308).
|
Body “stance” reference key.
|
Body twisted-part reference key.
|
Body base-of-twisted-part reference key.
|
|
Figure IIIA-3. Labanotation symbols for body cross of axes with a divided front (Hutchinson, 1970, pp. 428-429).
|
IIIA.27 Labanotation Symbols for Reference Systems.
Labanotation symbols have been devised for the different reference systems (Fig. IIIA-1), for divided fronts in the body reference system (Fig. IIIA-2), and for divided fronts in the standard reference system (Fig. IIIA-3). These symbols might appear arbitrary but their orthography is based on a combination of components that are each used for similar meanings in other parts of the Labanotation system (this orthography is not reviewed here; see the references cited).
IIIA.30 Conclusions: Reference Systems
Spatial information must be defined relative to a system of reference. Types of egocentric (body-relative) and exocentric (environment-relative) reference systems have been identified in cognitive studies. Reference systems distinguished in Labanotation and choreutics are validated by the identification of similar reference systems within spatial cognition research. This similarity has not been heretofore explicitly identified and so constitutes new knowledge. A great deal of differentiation is provided in the Labanotation and choreutic reference systems which could serve as tools in spatial cognition research.